Flapping wings provide both power and control to flying creatures. Small natural flyers, such as insects, can hover close to bloom while still quickly escaping danger. Biologists have long been fascinated by animal flight, studying not only their complicated wing motion patterns and aerodynamics but also their sensory and neuro-motor systems as they perform such agile maneuvers. The Micro Air Vehicle Laboratory (MAVLab) at TU Delft has built a unique insect-inspired flying robot, which has been presented in Science (14th September 2018).
Experiments with this first autonomous, free-flying, and agile flapping-wing robot, conducted in conjunction with Wageningen University & Research, have increased our understanding of how fruit flies control aggressive escape maneuvers. The robot’s excellent flight qualities open up new drone uses, in addition to its promise in insect flight study. Flying animals have recently inspired robotics researchers who are attempting to construct lightweight flying robots that are nimble, power-efficient, and even scalable to insect proportions.
The new robot, dubbed the DelFly Nimble, is unrivaled in terms of performance while maintaining a simple and easy-to-produce design. The robot’s flapping wings, which beat 17 times per second, not only create the lifting power required to stay airborne but also regulate the flight via tiny wing motion modifications. The robot’s control mechanisms, which were inspired by fruit flies, have proven to be quite effective, allowing it to not only hover on the spot and fly in any direction but also to be extremely nimble.
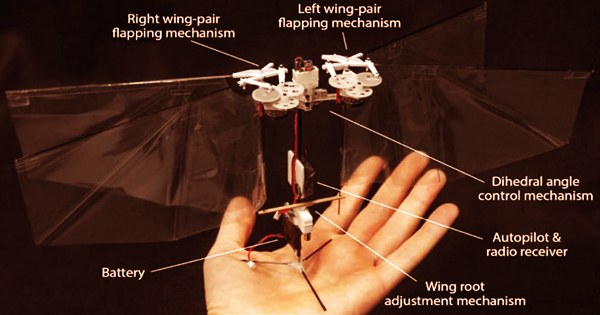
“The robot has a top speed of 25 km/h and can even perform aggressive manoeuvres, such as 360-degree flips, resembling loops and barrel rolls,” says Matěj Karásek, the first author of the study and main designer of the robot. “Furthermore, the 33 cm wingspan and 29-gram robot has exceptional power efficiency for its size, allowing 5 minutes of hovering flight or a flight range of more than 1 kilometer on a fully charged battery.”
The robot has a thrust-to-weight ratio of more than 1.3 and can carry up to 4 grams of additional payload (e.g. a camera system with a live video feed, additional sensors, etc.) 360-degree flips around the pitch or roll axes, as well as quick transitions from hover to forward or sideways flight, and vice versa, demonstrate the outstanding agility. The robot can attain a top speed of 7 m/s (25 km/h) when fully throttled. Aside from being a unique, self-contained micro-drone, the robot’s flight capabilities, paired with its programmability, making it ideal for insect flight study. TU Delft and Wageningen University have worked on this project.
The MAVLab has been developing insect-inspired flying robots for over 10 years within the DelFly project. The MAVLab scientific leader, Prof. Guido de Croon, says:
“insect-inspired drones offer a lot of potential for new uses because they’re light, safe near people, and can fly faster than typical drone designs, especially at smaller scales. However, until now, these flying robots had not realized this potential since they were either not agile enough such as our DelFly II or they required an overly complex manufacturing process.”
“When I first saw the robot flying, I was amazed at how closely its flight resembled that of insects, especially when manoeuvring. I immediately thought we could actually employ it to research insect flight control and dynamics,” says Prof. Florian Muijres from the Experimental Zoology group of Wageningen University & Research. The scientists decided to program the robot to emulate the hypothesized control actions of these insects during high-agility escape manoeuvres, such as those employed when we try to swat them, based on Prof. Muijres’ earlier work on fruit flies.
Forward/backward and sideways flying is performed by pitching and rolling the robot’s body in the desired direction, just as quadrotors or helicopters, but also like insects. The robot must be able to produce torques around the three orthogonal body axes in order to control body orientation (attitude). The robot is equipped with two separate flapping mechanisms, one for each of the robot’s wing pairs on the sides.
The dihedral angle is adjusted by changing the relative orientation of the two flapping mechanisms, and the tips of the left and right wing-pair roots are actuated by two rotary servo actuators. The torque around the roll axis is created by operating the two wing pairs at differing flapping frequencies, which results in a thrust differential. The DelFly Nimble is based on well-established manufacturing procedures, employs off-the-shelf components, and has a long enough flying endurance to be useful in real-world scenarios.
The robot’s movements were remarkably similar to those seen in fruit flies. Fruit flies adjust their spin angle to maximize their escape performance, which the robot was able to show. ‘In contrast to animal experiments, we were in full control of what was happening in the robot’s “brain.” This allowed us to identify and describe a new passive aerodynamic mechanism that assists the flies, but possibly also other flying animals, in steering their direction throughout these rapid banked turns,’ adds Karásek.
Because it is lightweight, safe near humans, and able to fly more efficiently than more typical drone designs, especially at smaller scales, the robot offers the potential for novel uses. The DelFly Agile will be developed further as part of the TTW project “As nimble as a bee,” which is a collaboration between TU Delft and Wageningen University and is financed by the Dutch science organization NWO.
Information Sources: