The terrainability of a machine or robot is defined as its ability to negotiate terrain irregularities. Mobile robots are usually demanded to enter into unstructured terrain. Thus, terrainability of a robot is especially important in cluttered environments.
Terrainability is a term coined in the research community and related to locomotion in the field of mobile robotics. Mobile robots have been applied to various applications such as planetary explorations, agriculture, mining industries, and reconnaissance in dangerous situations. Such tasks may result in terrainability failures, which mainly include loss of obstacle-surmounting capability, loss of stability, and even tip-over.
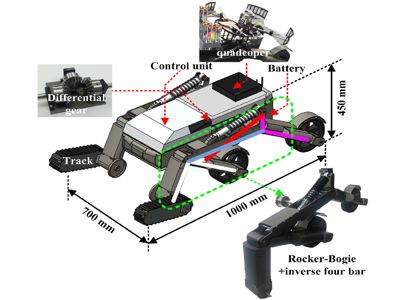
Mobile robots are usually demanded to enter into unstructured terrain. The mobile robot consists of four driving tracks, two rocker links, and four pitch-roll two-degrees-of freedom (2-DOF) passive joints. Thus, terrainability of a robot is especially important in cluttered environments. A novel mobile robot with variable-diameter wheels is designed here. For performance evaluation, the proposed mechanism was compared with several existing mechanisms, including four tracked mechanisms and three-wheel linkage-type mechanisms. This robot can adjust its attitude by variable wheel diameters to improve its terrainability.
Its various definitions generically describe the ability of the robot to handle various terrains in terms of their ground support, obstacle sizes and spacing, passive/dynamic stability, etc. However, trafficability of these robots may be insufficient. By increasing wheel diameter, a mobile robot can enhance both the tractive performance on soft terrain and terrainability.
Information Source: