Behavior-based robotics (BBR) is a subfield of robotics that focuses on designing and building autonomous robots that can interact with their environment by exhibiting behaviors similar to those of living organisms. The basic idea behind behavior-based robotics is that robots should be built with simple, modular behaviors that can be combined in various ways to produce complex and adaptive behavior.
In behavior-based robotics, the robot’s behavior is not explicitly programmed, but instead emerges from the interaction between the robot’s sensors and actuators and its environment. This approach to robotics is inspired by the way that animals and humans learn and adapt to their environment. It is a robotics approach that focuses on robots that can exhibit complex-appearing behaviors despite having little internal variable state to model its immediate environment, mostly by gradually correcting its actions through sensory-motor links.
Principles
Behavior-based robots are typically designed to operate in complex and dynamic environments where the robot’s behavior must be adaptive and responsive to changing conditions. Examples of behavior-based robots include autonomous vehicles, mobile robots used in manufacturing, and robots used for search and rescue operations.
By using biological systems as a model, behavior-based robotics distinguishes itself from traditional artificial intelligence. When compared to the behavior-based approach, classic artificial intelligence typically follows a path based on internal representations of events. Rather than using pre-programmed calculations to deal with a problem, behavior-based robotics relies on adaptability. This advancement has made behavior-based robotics commonplace in research and data collection.
Most behavior-based systems are also reactive, which means they do not require programming to determine the shape of a chair or the type of surface the robot is moving on. Instead, all information is derived from the robot’s sensor input. That information is used by the robot to gradually correct its actions in response to changes in the immediate environment.
Features
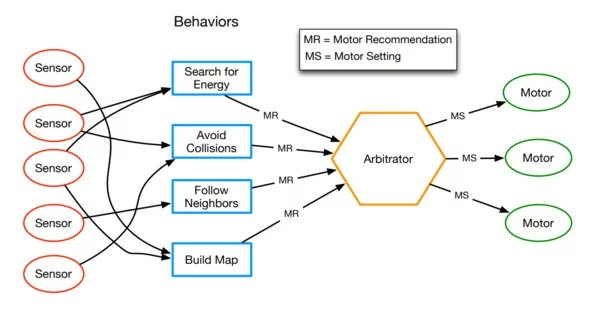
Most behavior-based robots are programmed with a basic set of features to get them started. They are given a behavioral repertoire to work with, dictating which behaviors to use and when, obstacle avoidance, and battery charging can provide a foundation to help the robots learn and succeed. Rather than creating world models, behavior-based robots simply react to their surroundings and problems. To solve problems, they use internal knowledge gained from previous experiences, combined with basic behaviors.
Advantages
Some of the key advantages of behavior-based robotics include robustness, adaptability, and scalability. Because behavior-based robots rely on simple, modular behaviors, they are less likely to fail in the face of unexpected events or changes in the environment. Additionally, the modular nature of behavior-based robotics makes it relatively easy to add new behaviors or modify existing ones, which allows robots to adapt to new tasks and environments.
Overall, behavior-based robotics represents a promising approach to building autonomous robots that can operate effectively in complex and dynamic environments.















