To interact with things and environments in a gentle and sensitive manner, soft and compliant materials, force sensors, and advanced control algorithms are frequently used by robotic systems with soft touch capabilities. These technologies have potential applications in industries such as healthcare (for surgical robots), industry (collaborative robots or cobots), and even consumer electronics (for soft-touch robotic assistants).
Scientists from the University of Bristol discovered that a simple sponge increased robot reach. This simple sponge-jamming device can assist stiff robots in handling delicate goods with care by simulating a human’s nuanced touch or varied stiffness.
Robots can skip, jump and do somersaults, but they’re too rigid to hold an egg easily. Variable-stiffness devices are potential solutions for contact compliance on hard robots to reduce damage, or for improving the load capacity of soft robots.
We were able to use a sponge to make a cheap and nimble but effective device that can help robots achieve soft contact with objects. Its low cost and light weight contribute to its high potential.
Tianqi Yue
This study, published at the IEEE International Conference on Robotics and Automation (ICRA) 2023, shows that variable stiffness can be achieved by a silicone sponge.
Lead author Tianqi Yue from Bristol’s Department of Engineering Mathematics explained:
“In touch situations, stiffness, sometimes known as softness, is significant. Robotic arms are too inflexible to make such a soft human-like hold on fragile objects such as an egg. Humans vary from robotic arms in that we have soft tissues that surround stiff bones, acting as a natural mitigating mechanism. In this study, we developed a soft device with variable stiffness that can be attached on the end of a robotic arm to make robot-object contact safe.”
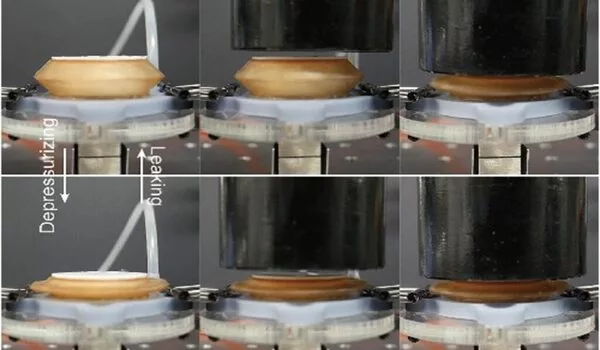
Silicone sponge is a cheap and easy-to-fabricate material. It is a porous elastomer just like the cleaning sponge used in everyday tasks. By squeezing the sponge, the sponge stiffens which is why it can be transformed into a variable-stiffness device.
This gadget could be employed in industrial robots to grab jelly, eggs, and other delicate things. It can also be used to make human-robot interaction safer in service robots.
“We were able to use a sponge to make a cheap and nimble but effective device that can help robots achieve soft contact with objects,” Mr Yue added. Its low cost and light weight contribute to its high potential. We anticipate that this variable-stiffness silicone-sponge technology will provide a novel solution in industry and healthcare, such as tunable-stiffness requirements on robotic polishing and ultrasound imaging.”