A servomechanism, abbreviated as servo in control engineering, is an automatic system that uses error-sensing negative feedback to adjust the operation of a mechanism. A servo, also known as a servomotor, is a form of control system that uses feedback to manage the position, speed, or other properties of a machine or system. In displacement-controlled applications, it typically contains an encoder or other position feedback system to guarantee that the output produces the required effect.
Servomechanisms are widely utilized to achieve precise and controlled movements in a variety of applications, including robotics, aerospace, manufacturing, and automotive industries. Only systems in which feedback or error-correction signals aid control of mechanical position, speed, attitude, or any other measurable quantity are covered by the term. A power window control in an automobile, for example, is not a servomechanism because there is no automatic feedback that controls position—the user does this by observation. A car’s cruise control, on the other hand, employs closed-loop feedback, classifying it as a servomechanism.
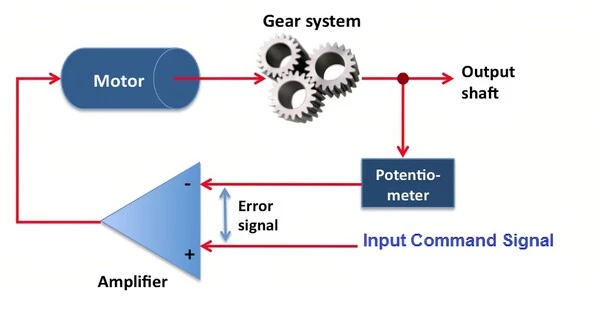
Here are some key characteristics and components of a typical servomechanism:
- Controller: The controller is the servomechanism’s brain. It takes in signals and compares them to a desired or reference value. The controller creates a control output based on this error signal to move the system toward the desired state.
- Feedback System: A servomechanism cannot function without feedback. Sensors or transducers are employed to measure the system’s current status or output. This data is given back to the controller, allowing it to change the control output in real-time to minimize the difference between the desired and actual states.
- Actuator: The actuator is in charge of converting the controller’s control output into mechanical movement. An electric motor, hydraulic cylinder, pneumatic actuator, or any other device capable of turning energy into motion could be used.
- Load: The load is the mechanical system or component that the servomechanism is controlling. This could be a robot arm, a valve, a camera gimbal, or any other device that needs precise control.
- Reference Input: The desired setpoint or target value that the servomechanism is attempting to achieve is represented by the reference input. The controller compares this input to the feedback signal to detect the mistake and makes necessary modifications.
Servomechanisms are intended to give precise and fast control over a wide range of applications. They are commonly used in scenarios requiring precision, stability, and responsiveness, such as in CNC (Computer Numerical Control) machines for manufacturing, where they precisely control the position of cutting tools, or in aerospace applications to stabilize aircraft and control their flight surfaces. In robotics, servos are commonly employed to control the movements of robot arms and other robotic components.