Human exploration has always been interested in the Jovian system. However, Jupiter and its four Galilean moons create a special and complex multi-body dynamical environment that makes designing and optimizing trajectories extremely difficult.
The intense radiation environment of Jupiter and the limited amount of available fuel further exacerbates the challenging nature of trajectory design for missions. In the past two decades, a number of theories and methodologies of trajectory design and optimization have been presented or developed in order to meet the criteria of various missions of the Jovian system exploration, develop new mission concepts, and achieve higher merit at lower cost.
A thorough evaluation of these methodologies is lacking, which is detrimental to the ongoing development of new design methods and the suggestion of new mission frameworks.
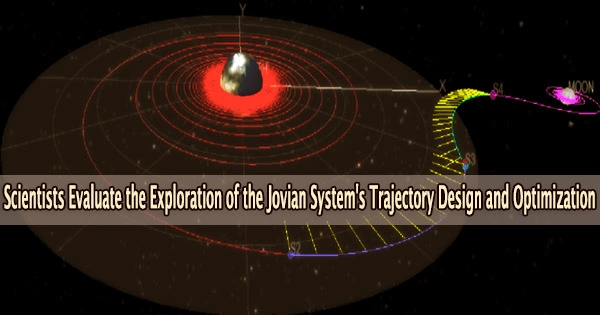
In a review article recently published in Space: Science & Technology, scholars from Nanjing University of Aeronautics and Astronautics and Rutgers, The State University of New Jersey provide a systematic summarization of the past and state-of-art methodologies for four main exploration phases, including Jupiter capture, the tour of the Galilean moons, Jupiter global mapping, and orbiting around and landing on a target moon.
First, authors review the techniques, design, and optimization of Jupiter capture trajectories. Using the satellite-aided capture technique, the required Δv can be lowered significantly. According to the number of the Galilean moons involved, it can be classified as single, double, triple, and quadruple-satellite-aided captures. In the last century, single-satellite-aided capture condition has been derived by Cline in the two-body problem.
In order to find triple and quadruple-satellite-aided capture sequences through flybys of two or more Galilean moons, Lynam et al. proposed using the techniques of a phase angle analysis based on the Laplace resonance and the near-resonance of Callisto and Ganymede.
Multiple-satellite-aided capture is more complex but is able to further decrease the required Δv compared with single-satellite-aided capture. In addition, Macdonald and McInnes have analyzed the problem of satellite-aided capture without Δv. Other methods to cut costs have also been suggested. Due to Jupiter’s powerful magnetic field, a spaceship with a long tether may be able to produce a larger-than-normal Lorentz force as propulsion for capture.
As compared to conventional chemical propulsion, solar electric propulsion (SEP) has a significantly higher specific impulse, making it a good alternative for missions to explore Jupiter. Another effective method for achieving Jupiter orbit is the cloudtop arrivals strategy. Additionally, two scenarios can be distinguished between the research on trajectory design and optimization for putting a spacecraft into a Jovian orbit.
While the second instance combines heliocentric interplanetary transfers with satellite-assisted captures, the first case exclusively concentrates on the trajectories in the Jupiter system. Different design and optimization techniques are created while taking into account various dynamics.
Second, authors review the tours of Galilean moons. Due to its simplicity, the patched-conics model is frequently used to analyze and create tour itineraries that include flybys of Galilean moons. Resonant hopping, petal rotation, crank-over-the-top (COT) sequences, switch-flip, and Cyclers are special flyby sequences in the tour of Galilean moons.
The V-infinity leveraging maneuvering (VILM) technique can achieve desired changes on the excess velocity of the spacecraft to the moon, and improve the efficiency of orbit maneuver. The Tisserand graph and the (V-Infinity, Resonance) Graph are useful tools for designers to pick up viable gravity-assist sequences.
The two-body methods have some drawbacks in terms of application and do not fully take use of the dynamics of the Jupiter-moon system. As a result, a number of methods for designing three-body trajectories have been devised. Tisserand-Poincaré graph, Flyby map, and Tisserand-leveraging transfer are developed in a gradual way, for designing low-Δv orbit transfers in CRTBP.
An entry point for creating an affordable tour trajectory between moons is provided by invariant manifolds of libration point orbits and unstable resonant orbits. Recent investigations have raised significant questions about how to effectively patch invariant manifolds. The three-body problem’s dependence on numerical integration, which cannot be solved analytically, is another major issue impeding design efficiency.
The widely used artificial intelligence (AI) method offers a fresh potential solution to the problem. Additionally, it is crucial in engineering practice to transform low-fidelity trajectories to high-fidelity trajectories. A continuation parameter κ can be used to convert the patched-conics model to the n-body model, according to a continuation method by Bradley and Russell.
As for the optimization, the deterministic optimization of a tour mission includes two parts: (a) the flyby sequence optimization that requires broad search and (b) impulsive and continuous trajectory optimization with a given flyby sequence.
However, there are a lot of unknowns in an actual mission, including model uncertainties, navigation mistakes, orbital maneuver errors, etc., thus it’s important to build strong launch trajectories.
Third, authors review Jupiter global mapping trajectories. The global mapping trajectories for Jupiter require large inclinations as opposed to the low-inclination tour trajectories. One way to raise the inclinations of the spacecraft is to employ the gravity aids of the Galilean moons.
However, recurring ground-track orbits are created under Jupiter’s non-sphere disturbance. In addition, adjusting the exploration orbit around Jupiter may require long-flight-time transfer trajectories, which is challenging due to the convergence problem using the initial guess from a Keplerian Lambert solution.
Forth, authors review moon orbiter and lander trajectories. Low-altitude and near-polar orbits around Galilean moons make good candidates for science orbits, however strongly inclined orbits around Europa are unstable and prone to colliding with Europa because of the third-body gravitational pull of Jupiter.
Different scholars considering tidal force of Jupiter and the J2, C22, J3 and J4 perturbations of Europa investigate how to design long-life orbits. In addition, high-inclination and near-circular artificial frozen orbits around Europa with low thrust are investigated. Solutions of natural frozen orbits are also found for Ganymede and Callisto based on the Milankovitch elements.
An alternate method of moon observation involves using low-energy orbits, and the heteroclinic and homoclinic linking between unstable periodic orbits near the L1 and L2 points of the planet-moon three-body system are recommended as mission orbits for observations. As for orbit capture at Galilean moons, the first issue is how to approach the target moon.
Resonance orbits are a key component of the final planar and spatial approach, and the necessary resonances were assessed using computations of the invariant manifolds of Lyapunov and halo orbits. The second crucial issue, where the interim capture is an option, is lowering the capture cost. As for landing on Galilean moons, only a few studies have been published on design trajectories for Galilean moon landing.
A brief summary about comparing different techniques and methods is given as follows:
- The two-body techniques are useful for designing flyby trajectories in the Jovian system and not able to utilize the multi-body dynamics possibly leading to higher fuel cost, while the three-body techniques or multi-body techniques can further utilize the natural dynamics of the Jovian system but more complex and time-consuming.
- Low-thrust techniques can save fuel due to the much higher specific impulse or utilizing the magnetic field of Jupiter. However, the orbit correction ability of low thrust is lower than delta-V, which leads to new navigation challenges.
- Since the majority of current trajectory optimization techniques are deterministic, future navigation analysis is necessary since the generated trajectories are not robust to uncertainty. In contrast, robust trajectory optimization considers the uncertainties and the obtained optimal control is robust.
However, because of the wide solution space and the propagation of orbit uncertainty in multi-body dynamics, robust trajectory optimization is difficult.
According to the current research progress, development in the following aspects is expected in the future: (1) multi-body techniques in engineering mission design, (2) robust trajectory optimization methods, and (3) AI techniques.