A little robot with insect-like wings can fly and create more power than a comparable-sized animal in nature. Most flying robots, whether they use wings or propellers, contain motors, gears, and transmission systems to connect the components, but this can add weight and failure to the robot.
A University of Bristol team has created a new driving system for flapping-wing autonomous robots that uses an electromechanical zipping mechanism that eliminates the need for conventional motors and gears.
This new breakthrough, which was published in the journal Science Robotics, may pave the way for smaller, lighter, and more effective micro flying robots for environmental monitoring, search and rescue, and deployment in hazardous situations.
Until now, conventional micro flying robots used motors, gears, and other sophisticated transmission systems to move the wings up and down. This has increased complexity, weight, and unfavorable dynamic impacts.
With the LAZA, we apply electrostatic forces directly on the wing, rather than through a complex, inefficient transmission system. This results in improved performance and simpler design, as well as the creation of a new class of low-cost, lightweight flapping micro-air vehicles for future applications such as autonomous inspection of offshore wind farms.
Dr. Tim Helps
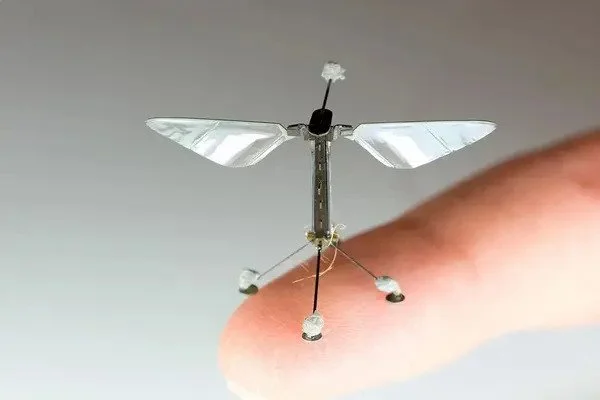
Taking inspiration from bees and other flying insects, researchers from Bristol’s Faculty of Engineering, led by Professor of Robotics Jonathan Rossiter, have successfully demonstrated a direct-drive artificial muscle system, called the Liquid-amplified Zipping Actuator (LAZA), that achieves wing motion using no rotating parts or gears.
The LAZA system greatly simplifies the flapping mechanism, enabling future miniaturization of flapping robots down to the size of insects.
The researchers demonstrate in their paper how a pair of LAZA-powered flapping wings may deliver more power than insect muscle of the same weight, enough to propel a robot across a room at 18 body lengths per second. They also demonstrated how the LAZA can offer consistent flapping over more than one million cycles, which is critical for developing flapping robots capable of long-distance flight.
The team anticipates that the LAZA will be used as a fundamental building element for a variety of autonomous insect-like flying robots.
“With the LAZA, we apply electrostatic forces directly on the wing, rather than through a complex, inefficient transmission system,” explained Dr. Tim Helps, primary author and developer of the LAZA technology. This results in improved performance and simpler design, as well as the creation of a new class of low-cost, lightweight flapping micro-air vehicles for future applications such as autonomous inspection of offshore wind farms.”
“Making smaller and better performing flapping wing micro robots is a major task,” Professor Rossiter stated. LAZA is a significant step toward autonomous flying robots that could be as small as insects and perform environmentally crucial duties like plant pollination as well as interesting new responsibilities like discovering individuals in collapsed buildings.
The winged robot had no on-board electronics or controls and flew while tethered to a nylon rope, so it was primarily a proof of concept. For use in real-world scenarios, small electronics would need to be incorporated without adding too much weight so that the robot could generate enough power to take flight.
The wing mechanism, however, could still be a vital component of future flying microrobots, according to Raphael Zufferey of the Swiss Federal Institute of Technology in Lausanne. “It’s one of those fundamental building components that any flying vehicle requires.” Any technology that permits us to develop new sorts of flying robots will have a significant influence.”
Some drones employ sensors to identify obstructions and avoid collisions. Initially, the sensors were intended to detect objects in front of the drone. Some drones now detect obstacles in five directions: front, back, below, above, and side to side. Drones land using visual positioning systems with downward-facing cameras and ultrasonic sensors. The ultrasonic sensors determine how close the drone is to the ground.
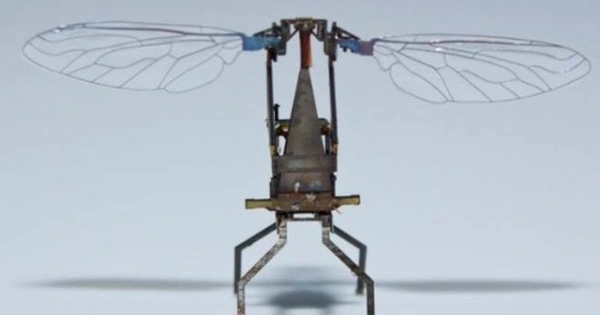
The project was coordinated by CIA technologist Charles Adkins, although the majority of the work was done at the Vought ATC by a single exceptionally imaginative engineer (whose name remains classified). This engineer was an amateur watchmaker and entomologist who went so far as to build a little wind tunnel to test his idea.
While it operated admirably in a highly controlled test environment, the insectithopter proved difficult to fly outside, where even the smallest breeze would send it plummeting to the ground. The project was shelved in the mid-1970s and never saw operational usage.