Researchers at Carnegie Mellon University (CMU) developed an algorithm that could allow autonomous vehicles to navigate crowded, narrow streets where vehicles traveling in opposite directions do not have enough space to pass each other and there is no knowledge of what the other driver may do. A scenario like this necessitates collaboration among drivers, who must strike a balance between aggression and cooperation.
The researchers created models of various levels of cooperation among drivers and used them to train the algorithm. The algorithm outperformed current models in simulations, but it has yet to be tested on real-world vehicles.
Anyone who has driven down a crowded, narrow street is familiar with this scenario. Cars are parked on both sides, and there isn’t enough room for vehicles traveling in both directions to pass each other. To allow the other to pass, one must duck into a gap in the parked cars or slow down and pull over as far as possible.
Autonomous vehicle researchers have tackled navigating a crowded, narrow street, with cars parked on both sides, and not enough space for vehicles traveling in both directions to pass each other.
Drivers figure it out, but not without close calls and frustration. Programming an autonomous vehicle (AV) to do the same – without a human behind the wheel or knowledge of what the other driver might do – presented a unique challenge for Carnegie Mellon University Argo AI Center for Autonomous Vehicle Research researchers.
“It’s the unwritten rules of the road,” said Christoph Killing, a former visiting research scholar in the School of Computer Science’s Robotics Institute who is now a member of the Autonomous Aerial Systems Lab at the Technical University of Munich. “It’s a tricky bit. You must learn to negotiate this scenario without knowing whether the other vehicle will stop or proceed.”
Killing worked on this problem at CMU with research scientist John Dolan and Ph.D. student Adam Villaflor. The study, “Learning to Robustly Negotiate Bi-Directional Lane Usage in High-Conflict Driving Scenarios,” was presented at the International Conference on Robotics and Automation.
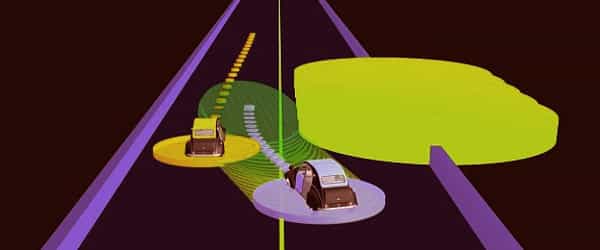
The team believes their study is the first of its kind into this specific driving scenario. It requires drivers, human or not, to work together to safely pass each other without knowing what the other is thinking. Drivers must strike a balance between aggression and cooperation. An overly aggressive driver, one who simply drives without regard for other vehicles, may endanger themselves and others. A driver who is overly cooperative, pulling over in the face of oncoming traffic, may never make it down the street.
“I’ve always found this to be an interesting and, at times, difficult aspect of driving in Pittsburgh,” Dolan explained. Autonomous vehicles have been heralded as a potential solution to the last-mile delivery and transportation challenges. However, in order for an AV to deliver a pizza, package, or person, it must be able to navigate tight spaces and unknown driver intentions.
The team created a method to model different levels of driver cooperativeness, how likely a driver was to pull over to let the other driver pass and used those models to train an algorithm that could help an autonomous vehicle navigate this situation safely and efficiently. The algorithm has only been tested in simulation, not on a real-world vehicle, but the results are promising. The team discovered that their algorithm outperformed existing models.
This is just one of many complex scenarios that can occur while driving. As researchers work on them, they look for ways to make the algorithms and models developed for one scenario, such as merging onto a highway, work for other scenarios, such as changing lanes or making a left turn against traffic at an intersection.
“Extensive testing is revealing the final percent of touch cases,” Dolan said. “We keep finding these outliers and devising solutions to deal with them.” This is just one scenario for which autonomous vehicles will require special algorithms when they become available. Merging onto a highway, changing lanes, or making a left turn against traffic at an intersection are some examples.















