Many objects have developed in nature that differs in size, color, and, most importantly, form. While an object’s color or size may be simply defined, describing a form is more difficult.
Jacqueline Nowak of the Max Planck Institute of Molecular Plant Physiology and her colleagues have detailed a new and improved technique to describe forms based on a network representation that can also be used to reassemble and compare shapes in a paper published in Nature Communications.
For many future deployment situations, interference will be the primary performance bottleneck. However, the development of dynamic approaches for interference mitigation/avoidance and subchannel allocation is contingent on the network’s ability to communicate channel status information effectively. This is especially true in dispersed networks when node-to-node communication is limited.
The quantification of the lobe number of epidermal cells with GraVis outperforms existing tools, showing that it is a powerful tool to address particular questions relevant to shape analysis.
Zoran Nikoloski
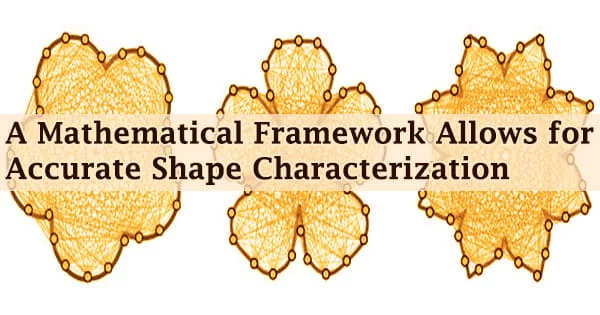
Jacqueline Nowak devised a unique method for studying forms that depends on a network-based shape representation called the visibility graph and a program called GraVis. The visibility graph depicts an object’s form, which is determined by its surrounding contour, and the mathematical structure of GraVis is described by a collection of nodes spaced evenly around the contour.
Edges that do not overlap or line with the form border link the nodes to one another. As a result, determining the visible graph for the examined form requires verifying the link between all pairs of nodes.
Jacqueline Nowak compared several forms using visibility graphs and the GraVis tool in her study. Visibility graphs of simple triangular, rectangular, and circular forms, as well as complicated shapes of sand grains, fish shapes, and leaf shapes, were compared to each other to assess the power of the novel technique.
They proved that the technique may be used to different forms based on their complexity by employing several machine learning algorithms. Furthermore, visibility graphs allow for the differentiation of form complexity, as demonstrated for epidermal pavement cells in plants, which have a shape comparable to jigsaw puzzle pieces. With GraVis, specific form metrics such as lobe length, neck width, and cell area can be reliably measured for these cells.
“The quantification of the lobe number of epidermal cells with GraVis outperforms existing tools, showing that it is a powerful tool to address particular questions relevant to shape analysis,” says Zoran Nikoloski, GraVis project leader, head of the research group “Systems biology and Mathematical Modelling” at the Max Planck Institute of Molecular Plant Physiology and Professor of Bioinformatics at the University of Potsdam.
It covers a broad mathematical framework model and numerical technique for dealing with fracture matrix interactions, which is applicable to both continuous and discrete-fracture models, in order to quantify fracture matrix flow. It demonstrates the feasibility of developing a unified numerical system and a uniform, generalized mathematical model to simulate multiphase fluid flow in any type of fractured reservoir.
The researchers want to use visibility graphs of epidermal cells and whole leaves in the future to get biological insights into critical cellular processes that influence form. Furthermore, GraVis can help genetic screens to uncover the genetic basis of morphogenesis by quantifying the form properties of distinct plant cells.
Finally, the use of GraVis will aid in gaining a better knowledge of how cells and organ forms interact in nature.